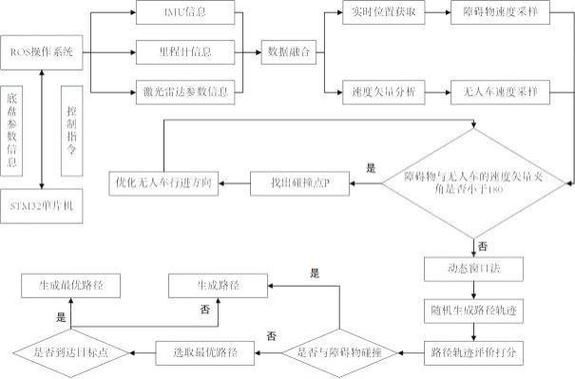
目标函数、状态转移方程和边界条件。
1) 目标函数:在路径规划中,我们的目标是找到从起点到终点的最优路径,这个目标可以通过定义一个代价函数来衡量每条路径的好坏,比如距离、时间、能耗等。
2) 状态转移方程:在动态规划算法中,我们需要定义一个状态转移方程来描述如何从一个状态转移到另一个状态,对于路径规划问题,我们可以将当前位置视为一个状态,然后考虑向周围的节点移动以到达下一个状态。
3) 边界条件:为了确保动态规划算法的正确性,我们需要设定一些边界条件,我们可以规定不能走回头路,或者在某些特定区域禁止通行等,这些约束条件有助于限制搜索空间并提高计算效率。
通过以上三个要素的组合应用,我们可以使用动态规划算法来解决复杂的路径规划问题。
本文来自作者[墨飞韵琳烟然]投稿,不代表臻货网立场,如若转载,请注明出处:https://www.zhenhuowang.com/kepu/202505-2074.html
评论列表(3条)
我是臻货网的签约作者“墨飞韵琳烟然”!
希望本篇文章《路径规划的方法分为 动态规划三要素是》能对你有所帮助!
本篇文章概览:目标函数、状态转移方程和边界条件,1) 目标函数:在路径规划中,我们的目标是找到从起点到终点的最优路径,这个目标可以通过定义一个代价函数来衡量每条路径的好坏,比如距离、时间、能...